

-

曲老师在中国智能可穿戴技术创新论坛做邀请报告
-

实验室科研成果参加粤港澳大湾区青年展览
-

实验室成员在中国微纳米年会做学术报告
-

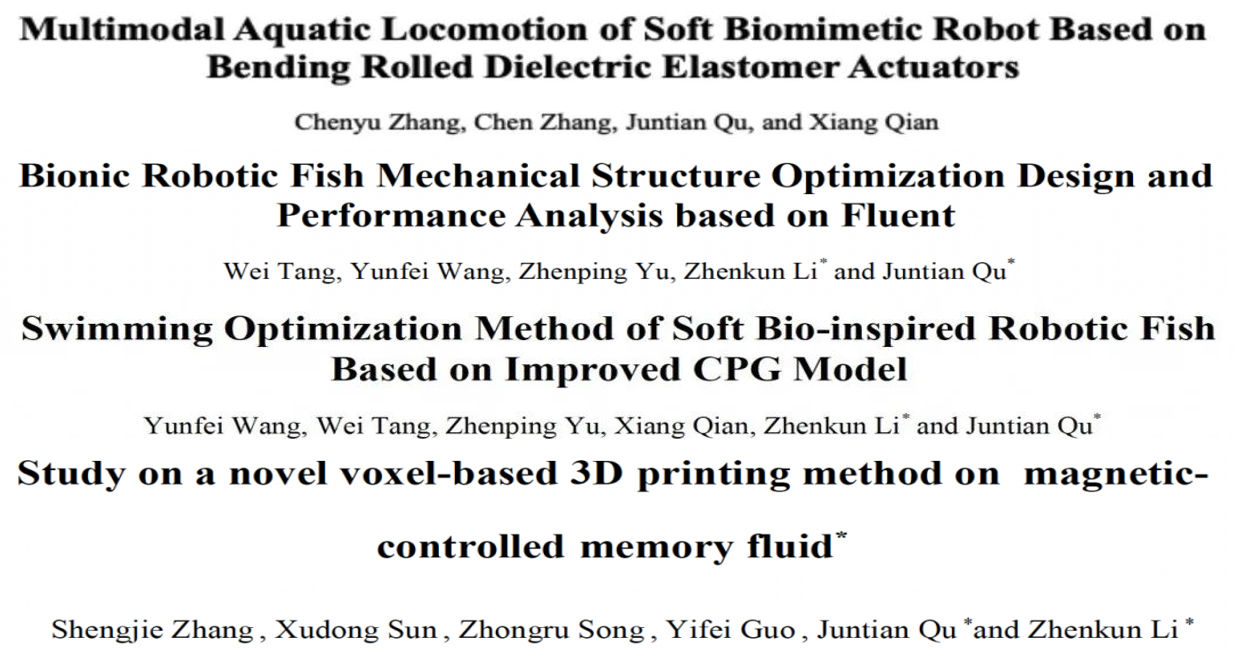
实验室软体机器人方向发表国际著名期刊综述论文
-

清华大学曲钧天课题组诚聘博士后
研究进展
Research
- 实验室近期授权7项发明专利 [2024-05-21]
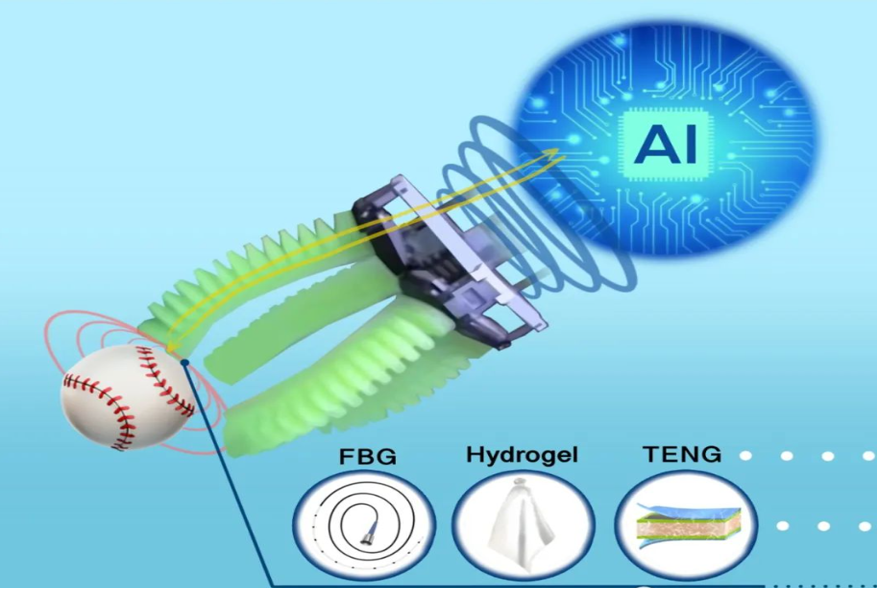
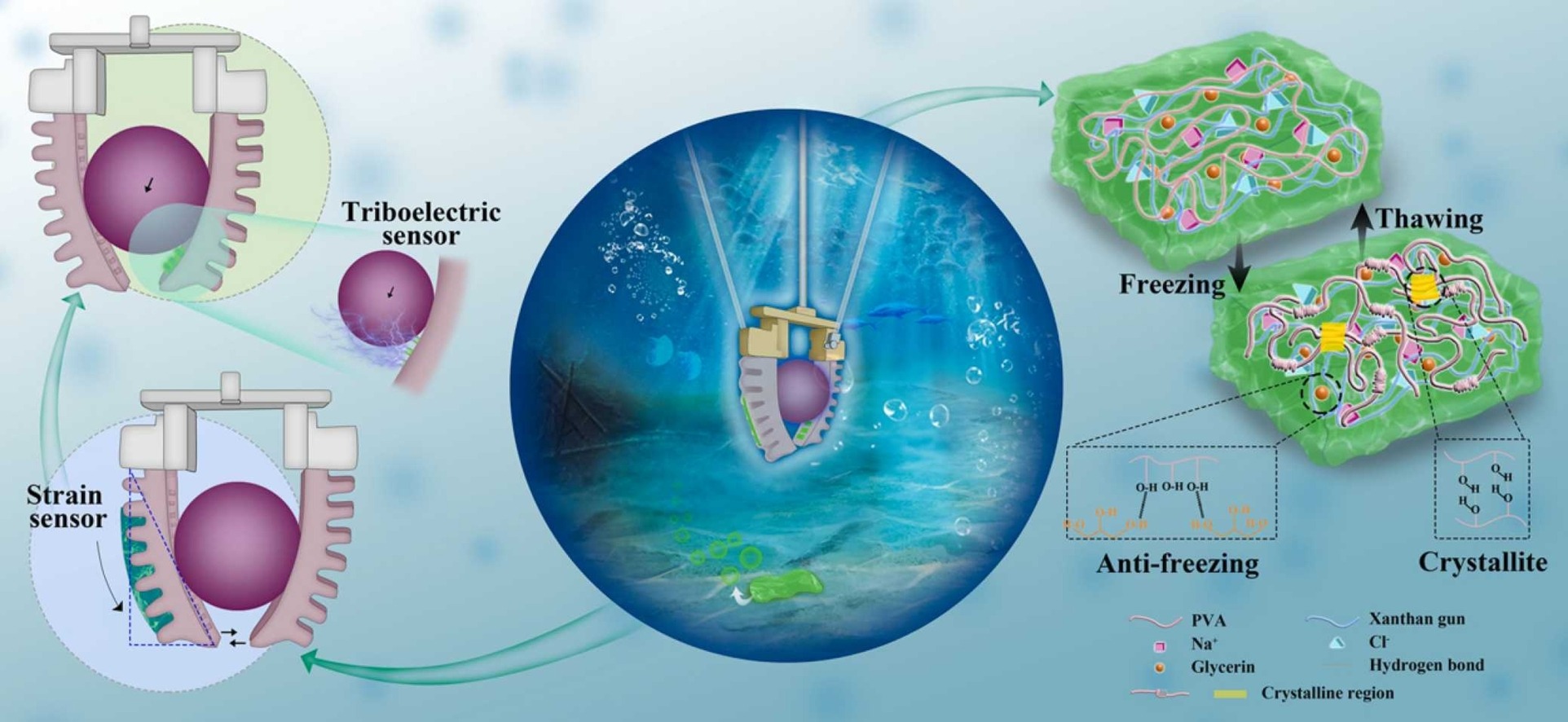
- 实验室水下传感器方向发表研究性论文 [2024-05-20]
- 实验室发表国际旗舰期刊软体机器人柔性传感综述文章 [2024-04-27]
- 实验室发表国际旗舰期刊机器人软抓手综述文章 [2024-02-01]
- 实验室软体机器人方向发表国际著名期刊综述论文 [2023-10-09]
- 喜报| 实验室成果荣获2024年度中国产学研合作促进会科技创新奖三等奖 [2025-03-20]
- 科研成果| 水下图像增强方向研究成果发表于IEEE JOE [2025-03-20]
- 短讯| 实验室授权5项中国发明专利和2项软件著作权 [2025-03-20]
- 科研成果| 实验室发表海上风电方向研究性论文 [2025-03-20]
- 科研成果| Elsevier Book Chapter: 可穿戴传感器微纳制造 [2025-03-20]
- OASIS LAB| 2024年度记忆 [2025-03-20]
- 喜报| 曲老师晋升清华大学副教授 [2025-03-20]
- 喜报| 实验室论文荣获深圳市科协2024年度优秀论文 [2025-03-20]
- 短讯| 曲老师荣获2023-2024学年度考核优秀教师 [2025-03-20]
- 招生招聘 | 清华大学曲钧天课题组诚聘博士后 [2023-04-05]

概况

招生招聘

留言板
Email:juntian.qu@sz.tsinghua.edu.cn